Traktor
V matematiky , je traktor je rovina křivka prochází bodem M spojené bodu T podle následujících podmínek:
- bod T prochází přímkou;
- vzdálenost MT je konstantní;
- přímka ( MT ) je tečna k traktoru.
Je také známá pod názvem ekvitangenciální křivka .
Historie tažných se datuje do XVII th století. Claude Perrault , který se s Leibnizem setkal kolem 70. let 16. století , by mu řekl o problému, který by již nastolil mnoha matematikům, aniž by získal uspokojivou odpověď. Položil kapesní hodinky na stůl a táhl je za řetízek pohybem konce tohoto řetízku podél přímočarého okraje stolu; poté se zeptá, jaká je trajektorie sledovaná hodinkami. Jsme tedy na samém začátku nekonečně malého počtu a diferenciálních rovnic . Leibniz navrhuje rovnici, ale skutečné rozlišení vyžaduje nástroj logaritmických funkcí nebo hyperbolických funkcí .
To bylo také studováno Isaacem Newtonem v roce 1676 , Huygensem v roce 1692 a Leibnizem v roce 1693 .
Mnoho matematiků, kteří patří do "tažného pohybu" , se pak zajímá o tuto křivku a navrhují konkrétní nástroje, "integrografy" , které umožňují konstrukci traktoru nebo složitější křivky z mechaniky. Traktor se také používá k výpočtu oblasti domény pomocí Prytzova planimetru .
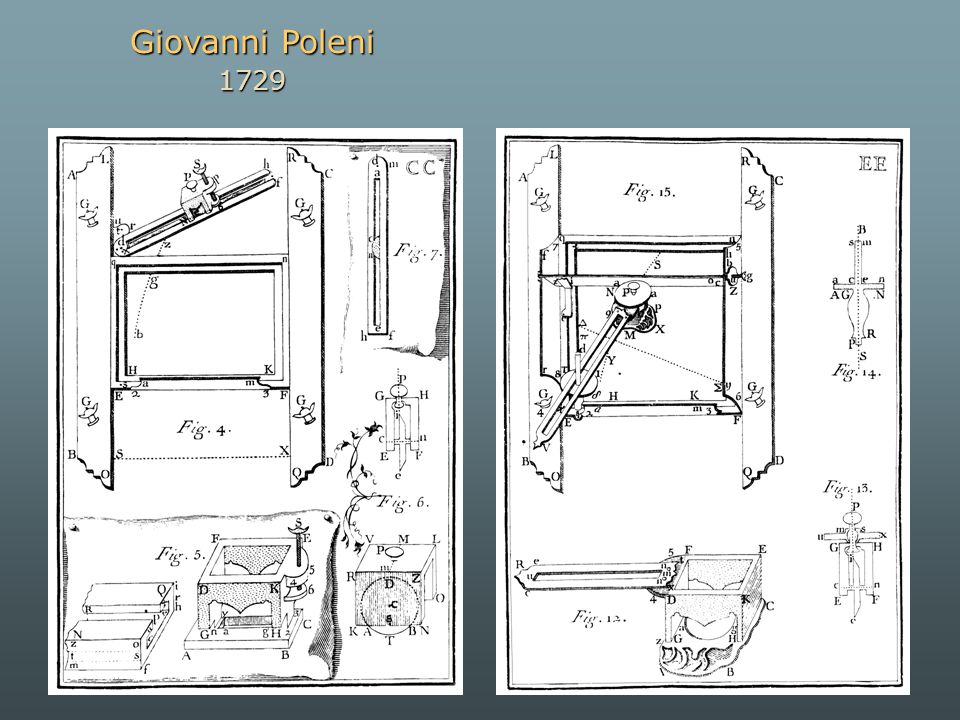
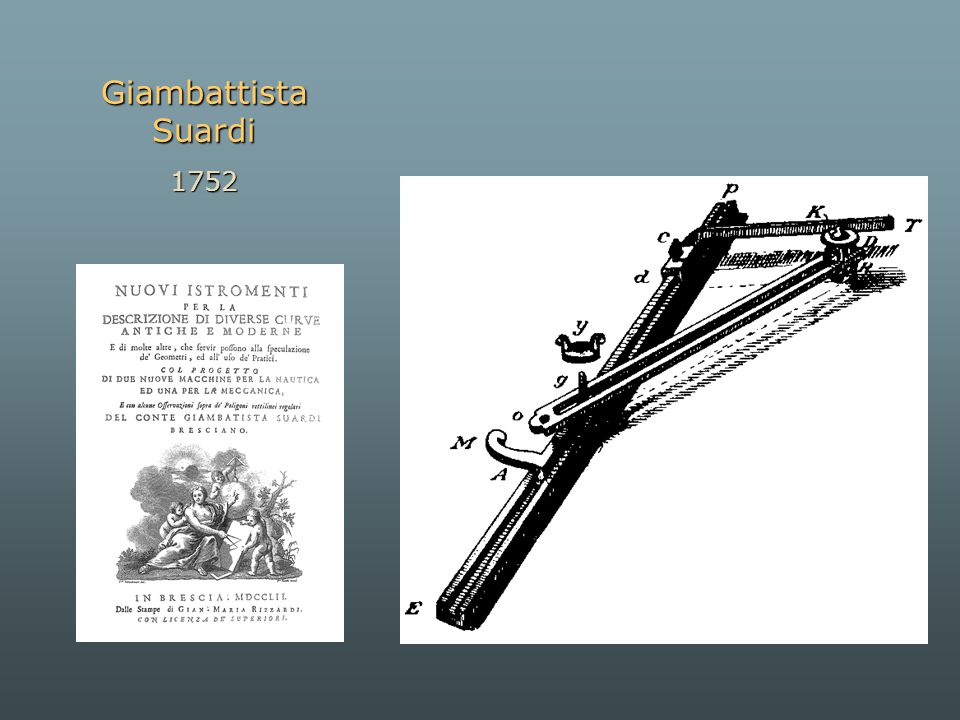
Můžeme citovat zejména nástroje Leibnize a Huygense v roce 1693 , Jakoba Bernoulliho v roce 1696 , Johna Perkse v roce 1706 , Giovanniho Poleniho v roce 1728 (první skutečně funkční nástroj), Giambattista Suardi (v roce 1752) .
Lze si představit konstrukci traktoru pomocí adaptace Eulerovy metody ( Leonhard Euler udržoval trvalou korespondenci, zejména s Giovannim Polenim v letech 1735 až 1739 ).
Vlastnosti
- Tahač je evolventní s řetězem .
- Připouští osu x jako asymptotu .
- Někdy se jí říká „křivka se stejnými tečnami“, která vyjadřuje, že délka tečných segmentů omezená na křivku a na asymptotu je konstantní.
- rotační plocha získané otáčením tažného vozidla o jeho asymptotu je pseudosphere z Beltrami . Tento povrch, který je místně izometrický k Poincarého polorovině , byl prvním explicitním modelem Lobachevského geometrie .
Grafická konstrukce
Abychom vytvořili aproximaci traktoru mezi body M 1 a M 2 sdruženými s body T 1 a T 2 , rozdělíme segment [ T 1 T 2 ] na n intervaly [ t i t i +1 ], které nám umožňují postavte n + 1 bodů m 0 ,…, m n traktoru ( m 0 = M 1 a m n = M 2 ) krok za krokem. Pokud r je vzdálenost M 1 T 1 , zakreslíme segment [ m i t i +1 ] a umístíme bod m i +1 na tento segment a ve vzdálenosti r od t i +1 .

Matematické rozlišení
Vezmeme-li v úvahu traktrix jako parametrizovanou křivku, jinými slovy, jsou-li x ( t ), y ( t ) kartézské souřadnice M v ortonormálním souřadnicovém systému, podívejme se na dvě funkce x a y ověřující x (0) = 0, y (0) = a kontrola požadovaných podmínek.
Na protějším obrázku se překládají do
- pro
- ( h , - y ) je úměrné ( x ' , y' ), protože ( MT ) je tečna ke křivce.


Problém tedy spočívá v řešení diferenciálního vztahu:
,
ve kterém jde o uvážlivý výběr parametrizovaných funkcí.
y jako funkce x
Když vezmeme jako parametr, získáme rovnici
,

být stále
.
Je to autonomní diferenciální rovnice . To bylo předvídatelné, protože studovaná geometrická vlastnost je invariantní translací rovnoběžnou s osou x : pokud má graf z požadovanou vlastnost, musí být stejná pro graf , bez ohledu na skutečnou .



Pro takovou rovnici můžeme na libovolném intervalu, kde nezmizí, vysvětlit vzájemné funkce řešení pomocí integrálů. Zde, pro požadované počáteční podmínky,
.

Tento integrál lze vypočítat různými změnami proměnné . Pokud se člověk omezuje na podmínky a je kladný nebo nulový, se stejnými počátečními podmínkami, a tak mimo jiné zjistí:



- pomocí kruhových trigonometrických funkcí : s (geometrie problému ukládajícího podmínku ) a . Poté, nahradí se : ;
- pomocí hyperbolických funkcí tanh a cosh : a .








Vztah mezi těmito dvěma úhly pohledu je dán Gudermannovou funkcí .
Poznámky a odkazy
- „ Traktor “ , na mathcurve.com .
- Waltier Masse, „ Mechanické nástroje integrace: Integratrix Giovanni Poleni (1729) “ , na slideplayer.fr ,16. března 2004.
- Waltier Masse, „ The Mechanical Instruments of Integration: Integratrix of Giambattista Suardi (1752) “ , na slideplayer.fr ,16. března 2004.
- Dominique Tournès, „ stavbě tractionnelle diferenciální rovnice v první polovině XVIII th století “ [PDF] na semioweb.msh-paris.fr ,19. března 2007.
- Viz například odkaz níže na Wikiversity .
{kind=link}
{kind=link}
Podívejte se také
Související článek
externí odkazy
- Trakční pohyb v geometrii na webu cabri.net
- Traktor na stránkách Serge Mehl